Drone Flight Mechanics
When flying drones, it is important to understand how they work. The drones we use are designed to say in place, or hover, when not using the controls. Therefore if you see the drone drifting in a certain direction, knowing how the drones work allows you to identify the issue and have it fixed so that it then flies as expected.
Important Vocabulary
|
Hover
|
Hovering is where a drone stays in place whilst airborne, it does not change location, nor does it change altitude
|
|
Climb
|
Climbing is where a drone increases its altitude, and therefore gets higher in the air.
|
|
Descend
|
Descending is where a drone decreases its altitude, and therefore gets lower in the air.
|
|
Pitch
|
When a drone moves forwards, or moves backwards, we call this pitching. For the drones we use, pitching forward means moving in the direction that the camera is facing.
|
|
Roll
|
When a drone moves sideways, either left or right, we call this rolling. When describing rolling we describing it from the the perspective of the drone, like we are sitting in it. Therefore rolling left is a movement to the left from the perspective of the drone.
|
|
Yaw
|
This is a movement where the drone rotates without a change of position, this is the equivalent of turning around on a swivel chair. This means this movement is the only one in which you change the direction the camera is pointed in. When combined with pitching forward this would be the equivalent of flying the drone like you would drive a car. the steering wheel providing the yaw and the rotation of the wheels providing the pitch.
|
Scientifc Explanation of Drone Flight and Movement
|
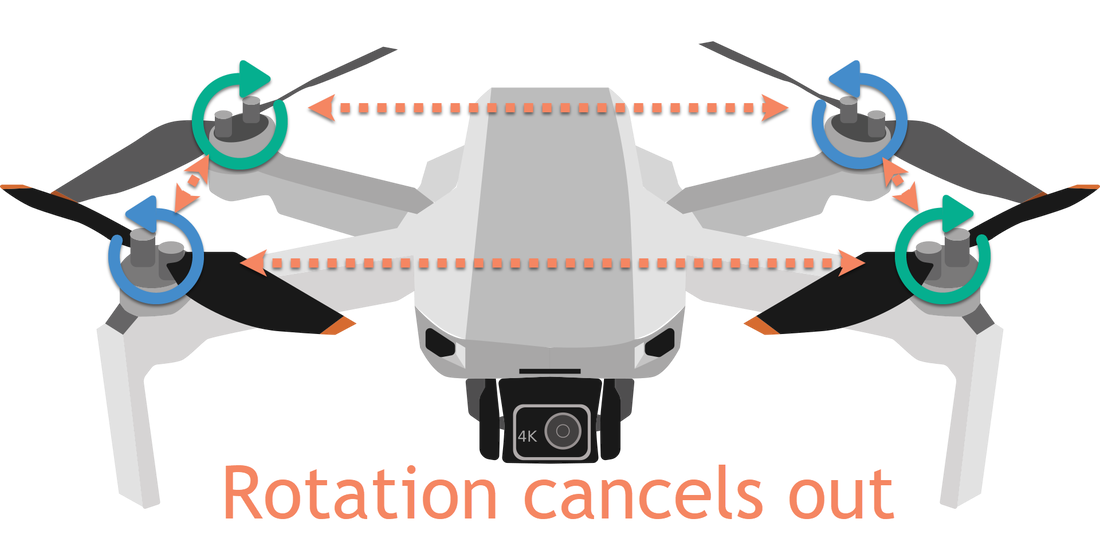
When you look at a drone carefully you can see there are two different types of rotor blades. The ones diagonally opposite each other are the same and spin in the same direction, but they are different to the ones adjacent to them both vertically and horizontally, these spin in the opposite direction.
But why is this important? Why can't they all just spin in the same direction? Well the answer comes down to Newton's third law of motion which states that "for every action, there is an equal and opposite reaction". Therefore if all the blades are spinning in the same direction, then the drone itself would try to spin in the opposite direction. |

|
By spinning adjacent rotors in different directions we are able to cancel out that effect as one of the the rotors is trying to rotate the drone one way, and the other one is trying to spin it the other way, giving a overall effect of no rotation.
|
|
|
The video shown opposite shows this effect in action. in this case the bike wheel represents the rotor blades. By paying careful attention to which way the wheel is spinning you are able to see that the guy on the chair is rotating in the opposite direction to the wheel
|
|
By controlling the speed of rotors in pairs we are able to get the movements of hover, climb, pitch, roll and yaw. We speed up some pairs rotors, and slow down other pairs we create unbalanced forces that lead to those motions without loss of altitude
|
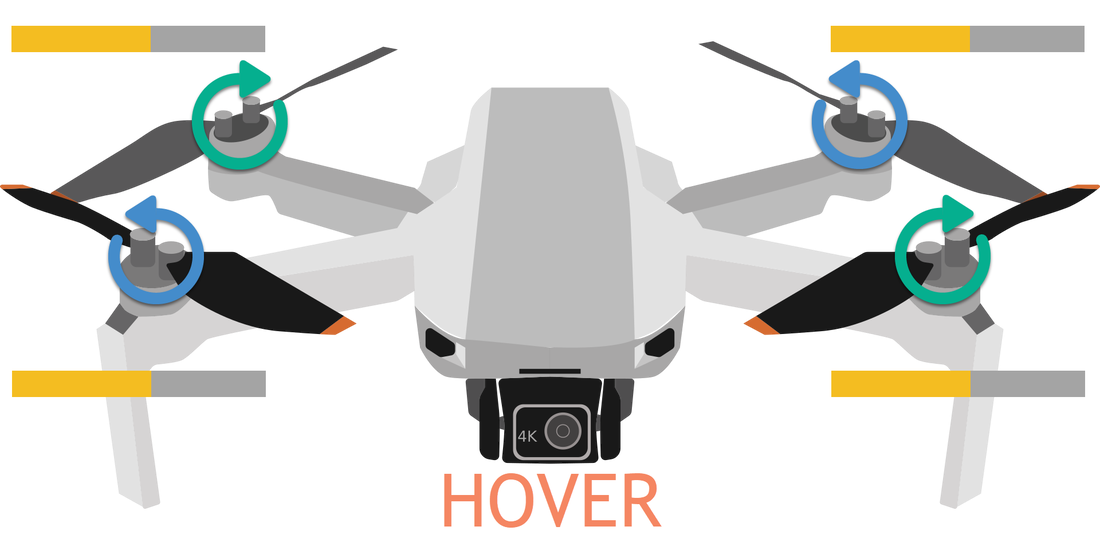
Hovering
In order for a drone to hover, all of the rotors need to run at the same speed (as shown by the yellow bars). In this case they need to run just fast enough that the force of lift made by the rotors is equal to the force of gravity on the drone. In this way the rotors are pushing the drone up just as much as gravity is pulling the drone down. |
|
|
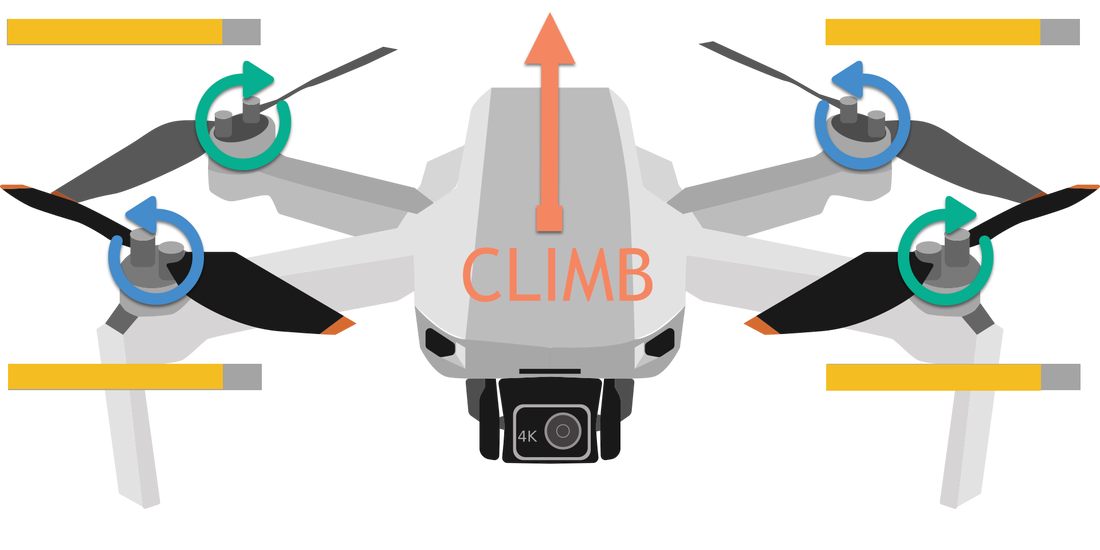
Climbing (and descending)
In order for a drone to climb, all of the rotors need to run at the same speed (as shown by the yellow bars). However in this case they need to run faster than they do when hovering. The increased speed, creates increased lift. and therefore the force of lift is more than the force of gravity, and therefore the drone rises. To descend (go to a lower altitude) you would slow down all of the rotors. In this case the force of gravity is more than the lift created by the rotors and therefore the drone lowers. |
|
|
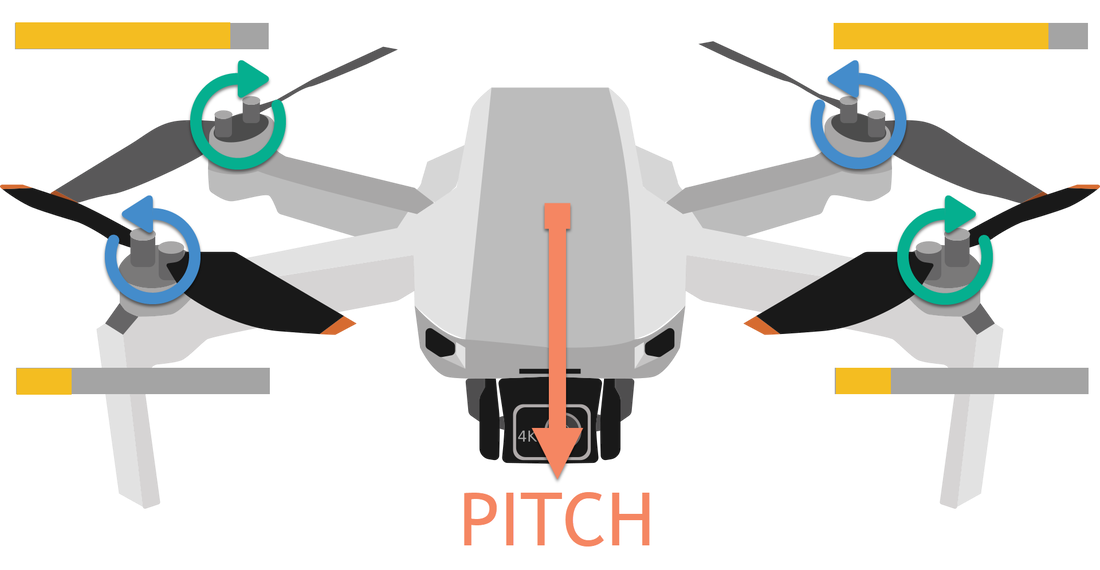
Pitching
In order for a drone to pitch forward. The motors at the back of the drone speed up, and the ones at the front slow down. This causes the back to lift and the nose to fall. Therefore the rotors are pushing air backwards slightly, causing the drone to move forward. The more you speed up the back rotors and slow down the forward ones, the faster it will go. In order to pitch backwards you do the opposite, slowing down the back rotors and speeding up the front ones. |
|
|
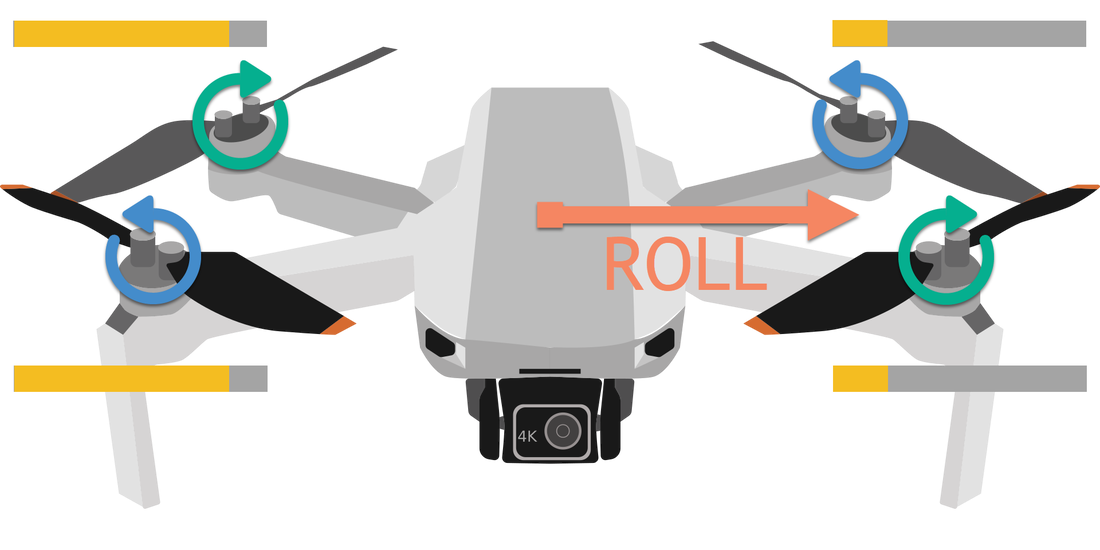
Rolling
In order for a drone to roll left. The motors on the right side of the drone speed up, and the ones on the left side slow down. This causes the right side to lift and the left side to fall. Therefore the rotors are pushing air to the right slightly, causing the drone to move left. The more you speed up the right rotors and slow down the left ones, the faster it will go. In order to roll right you do the opposite, slowing down the right rotors and speeding up the left ones. |
|
|
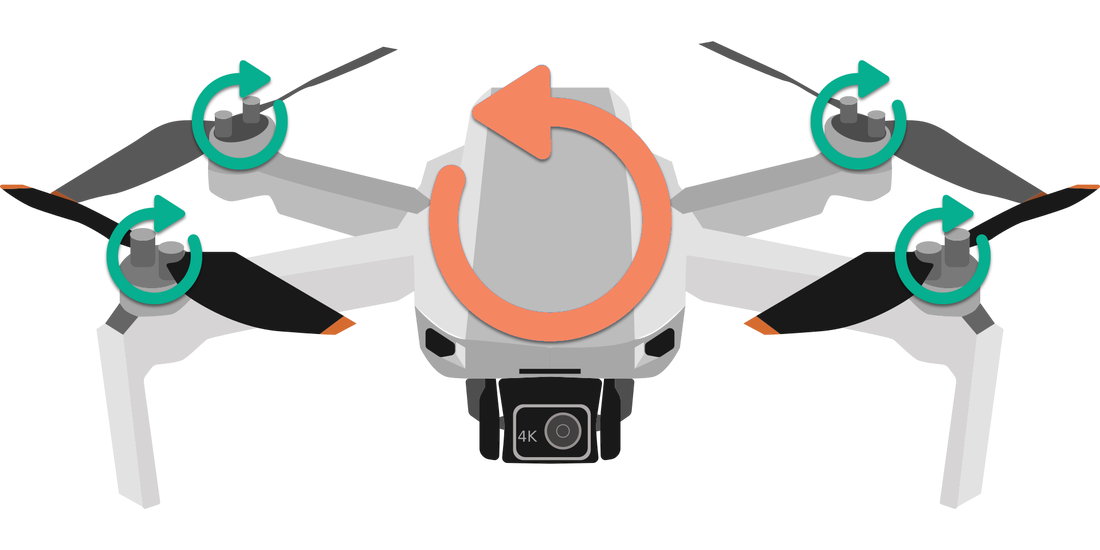
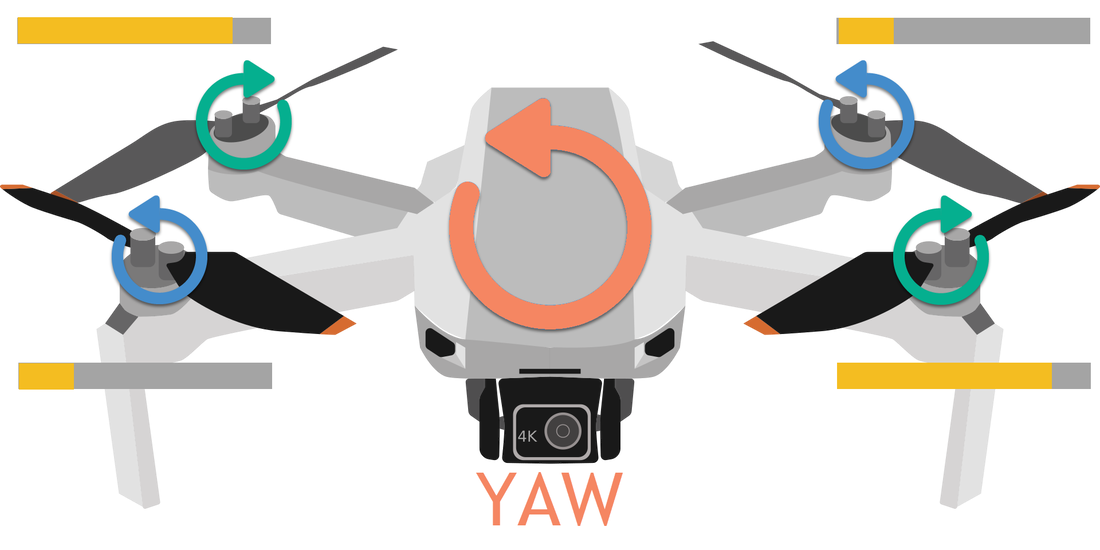
Yawing
Yawing is quite different to the other movements. As we stated previously we have rotors moving in opposite directions to prevent rotation of the drone, therefore if we want to turn the drone anticlockwise, we speed up the rotors that are moving clockwise and slow down the ones moving anti clock wise, this allows the rotation to take over a bit. We do the opposite if we are looking to turn the drone clockwise. |
|
